PiWars progress, PCBs & suspension
Wow, so much has happened in 5 days!
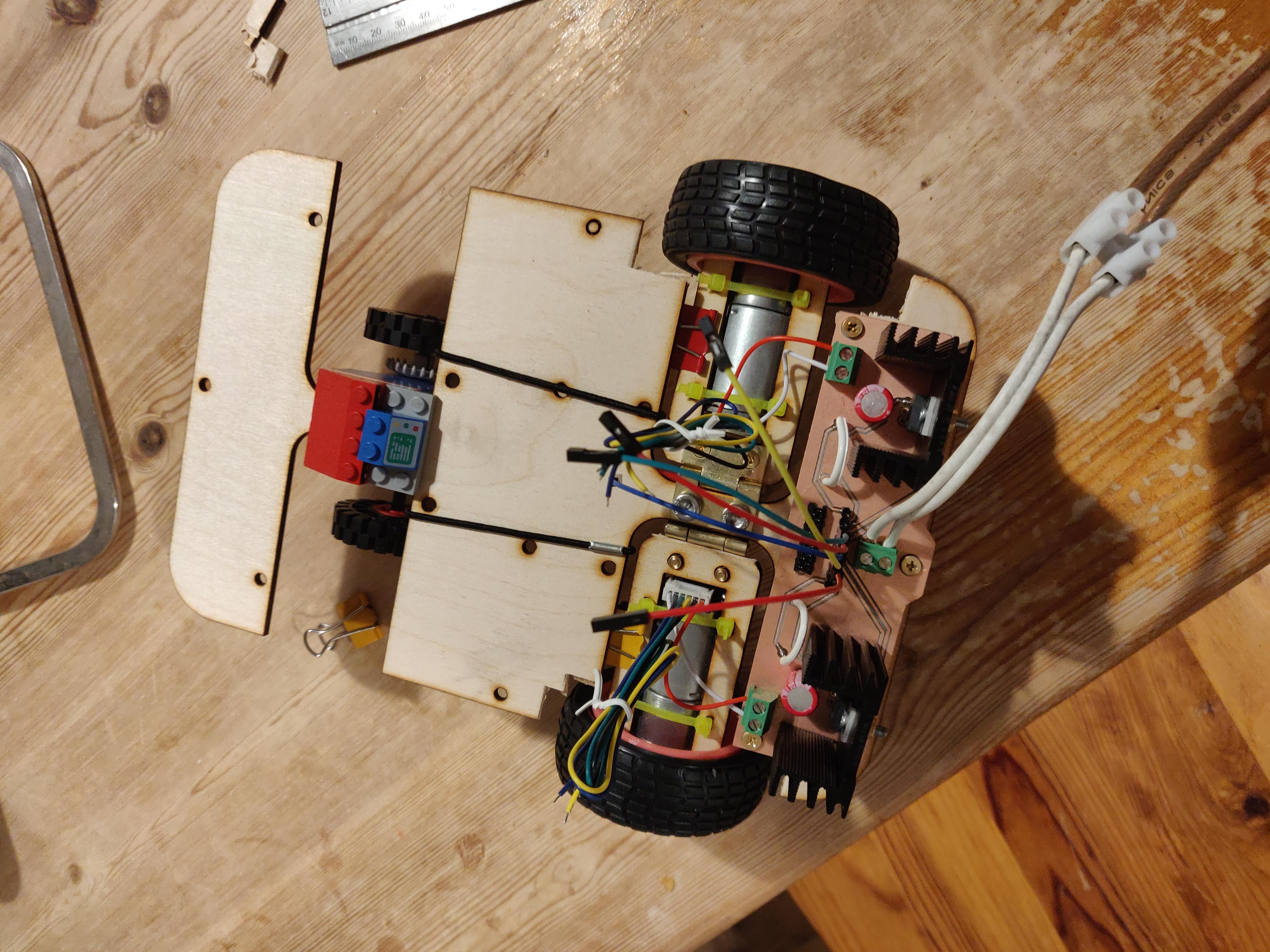
Phil has made some brilliant progress with the main robot. He's
- Designed the PCBs for the four motor drivers and the motor controller in Geda
- Created them using the miller
- Soldered up two of the motor drivers and the motor controller
- Got the front two motors working and running
- Built the suspension
- Create the top lid
Here's the video of it running at stage 4!
And here's the suspension and top lid working today
Upcoming
The other two motors are arriving soon so we can do a full test on this chasis/setup and suspension. Also arriving: the remote control.
After the final motors are in, it's all down to the software. Unless of course... this build is completly wrong and the robot doesn't drive straight :D